Robot and Automation Engineering Major
Robot Lab로봇실험(연구)실
로봇·자동화공학전공은 전기전자공학 기술이 결합된 기계공학 기술과 제어와 정보처리 기능을 가진 컴퓨터 공학 및 IT 기술을 결합하여 새로운 하이브리드 지능 시스템(hybrid intelligent system)과 시스템 통합(synergistic system)기술을 가진 전문 엔지니어를 육성함을 교육목표로 하며, 특히 메카트로닉스공학의 이론적인 원리를 실험실습을 통하여 학습하기 위하여 4개의 실험실 즉 자동화 실험실, 제어 실험실, 계측 실험실 그리고 로봇 실험실을 운영하고 있습니다.
로봇 실험(연구)실
로봇 실험실에서는 지능형 로봇, 산업용 로봇시스템에 대한 요소기술 및 응용에 대해 다룹니다. 또한 로봇 제어를 위한 임베디드 제어기의 H/W 및 S/W 설계기술, 정밀 구동기 제어를 위한 정밀모션 제어시스템에 대해 학습합니다. 지능형 로봇제어 학습을 위해 모바일 로봇과 밸런싱 로봇을 제작하여 로봇제어 이론을 학습합니다. 산업용 로봇제어 학습을 위해 6축 수직 다관절 로봇을 이용하여 로봇 정기구학, 역기구학, 자코비언 및 궤적계획에 대해 다루며, 단축 수직로봇을 이용하여 로봇 팔의 진동억제를 위한 지능제어 알고리즘에 대해 학습합니다. 또한 정밀 가공기 및 3축 데스크탑 로봇에 적용하기 위한 AVR/ARM/DSP 마이크로컨트롤러를 이용한 임베디드기반 및 PC기반 정밀 모션제어 시스템의 H/W 및 S/W 설계기술에 대해 학습합니다.
- 위치: 정보공학관 419호실
- 담당교수: 옥승호 교수, 김원호 교수
 NVIDIA Jetbot
NVIDIA Jetbot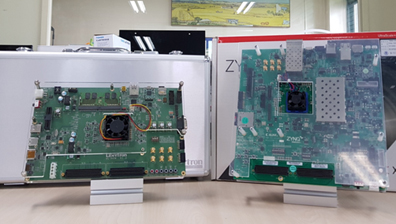 FPGA board
FPGA board 이동 로봇(RIA-E100)
이동 로봇(RIA-E100)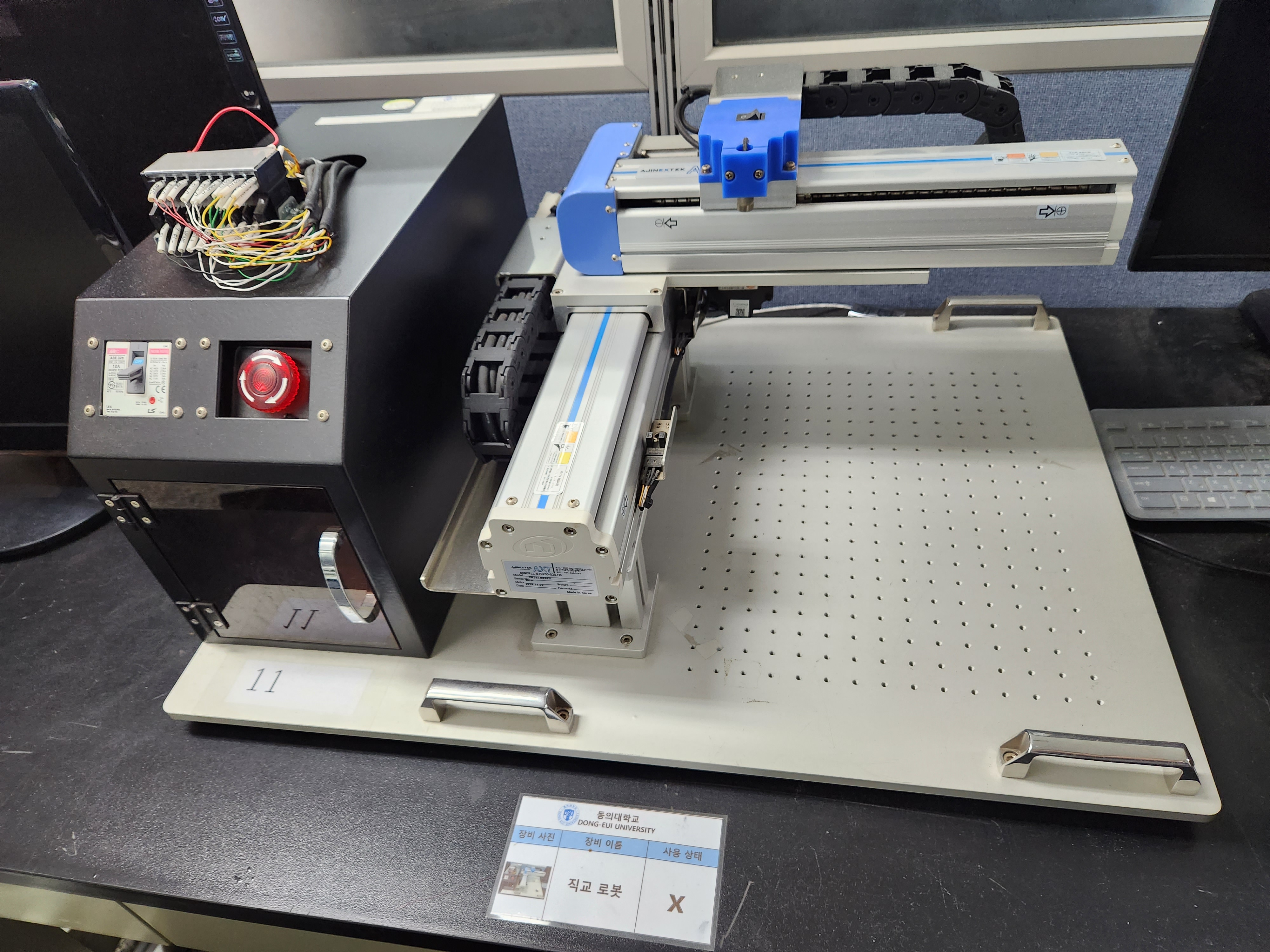 직교 로봇
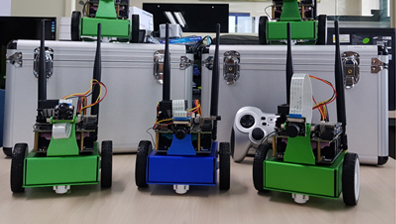
직교 로봇 터틀봇3 (자율주행로봇)
터틀봇3 (자율주행로봇) 터틀봇4 (자율주행로봇)
터틀봇4 (자율주행로봇) Microsoft Hololens2
Microsoft Hololens2 Oculus Quest 2
Oculus Quest 2 AI CAR (자율주행 RC카)
AI CAR (자율주행 RC카) 자율주행작업로봇 (AMMR)
자율주행작업로봇 (AMMR) 6축 매니퓰레이터 (ZEUS-ZERO)
6축 매니퓰레이터 (ZEUS-ZERO)
주요장비
- 이동 로봇(RIA-E100) : ROS 및 LiDAR 센서를 활용한 자율 주행 환경 구축 및 자율주행 로봇 구동
- 6축 매니퓰레이터(ZEUS-ZERO) : 다중 Depth 카메라를 활용한 매니퓰레이터의 인식 및 파지율 향상 방안 개발
- NVIDIA Jetbot
- 딥러닝 , 머신러닝 및 컴퓨터 비전을 사용한 스마트 AI 애플리케이션 구축
- 물체 인식, 충돌 방지 등과 같은 다양한 예제와 Jetson Nano AI 컴퓨터를 통해 초심자도 사용 가능
- FPGA board(ZCU102 board, Ultron board) : FPGA 플랫폼 기반 딥러닝 알고리즘 소프트웨어 구현 및 하드웨어 설계